感知 · 机器感知人类
基于 EIT 的手部姿态估计
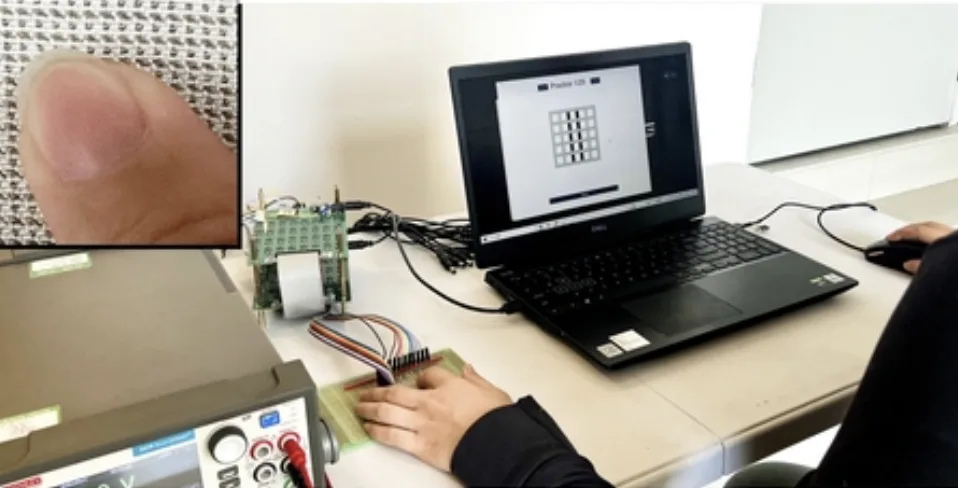
探索将电阻抗断层成像(EIT)作为一种新型感知模态,用于连续手部姿态估计。研究重点在于感知硬件的集成化与小型化,旨在为交互系统提供低功耗、无感(低侵入性)的可穿戴输入方案。

你好,我是
闭环人机交互研究者
西北大学(Northwestern University)
计算机科学系 · MU Collective · Jessica Hullman
我研究与构建人机交互闭环:以传感为信息输入,以刺激为信息输出,并探究智能系统如何基于这些信息支持以人为中心的决策。
我目前在西北大学计算机科学系(MU Collective)攻读研究生学位,师从 Jessica Hullman 教授。在此前研究中,我设计并构建用于感知人体行为的可穿戴传感系统,以及用于向用户传递信息的触觉界面;现阶段,我探索人与人工智能如何在不确定性下协同运用多模态信息,完成联合推理与决策。
在此之前,我曾先后在芝加哥大学 HC-Integration Lab(在 Pedro Lopes 教授指导下)、西北大学 SPICE Lab(在 Karan Ahuja 教授指导下)以及中国科学院软件研究所(在韩腾教授指导下)担任研究助理。我于宾夕法尼亚大学 GRASP Lab 获得机器人学硕士学位(M.S.E.),师从 Michelle Johnson 教授;本科毕业于西安交通大学工业设计专业,获工学学士学位(B.E.)。
人机交互是一个闭环系统:机器感知人类,人类感知机器,而两端的智能则决定如何高效运用这些信息。我的研究致力于闭合这一通道:构建用于读取身体信号的可穿戴传感技术、将信息写回皮肤的电触觉刺激技术,并深入探究人与 AI 如何基于这些通道承载的信息进行协同推理与决策。
感知 · 机器感知人类
探索将电阻抗断层成像(EIT)作为一种新型感知模态,用于连续手部姿态估计。研究重点在于感知硬件的集成化与小型化,旨在为交互系统提供低功耗、无感(低侵入性)的可穿戴输入方案。

智能 · 人机协同决策
探究人与 AI 协同情境下的推理与决策机制,重点关注不确定性信息的传达、AI 辅助决策,以及与人类认知过程相契合的交互界面设计。

刺激 · 人类感知机器
致力于研发紧凑型、高分辨率的电触觉交互界面,通过皮肤通道传递丰富的触感反馈,为可穿戴设备拓展感官增强与新型交互范式。
* 表示共同第一作者
欢迎对人智交互、新型传感与触觉技术、可穿戴计算等方向感兴趣的学者与同行来信交流。无论是探讨科研合作、分享学术见解,还是交流前沿热点,本人均非常期待您的来信。